alright it took me a while before posting this. for OPENCV 2.3.1 and Visual studio 2010 Professional on a windows 7 64 bit environment
Download The "super pack" and unzip to "C:\OPENCV"
it seems you can only get the source of opencv and need to compile it with CMAKE.
very straight forward.
download CMAKE and use the command prompt to enter CMAKE CMAKELIST.txt at the opencv directory
Open "ALL_BUILD" by double clicking - opens up visual studio
Compile it and wait. (took a minute)
go to properties and select the release version and compile again (took another minute)
your all set with the opencv installation "c:\opencv\build"
create an empty visual studio "win32 console application"
Click on Configuration Properties->VC++ Directories, and edit the Include Directories. Add:
C:\opencv\build\common\tbb30_20110427oss\include (UPDATE)
C:\opencv\build\include
Click on Configuration Properties->VC++ Directories, and edit the Library Directories. Add:
C:\opencv\build\common\tbb30_20110427oss\lib\ia32\vc10 (UPDATE)
C:\opencv\build\x86\vc10\lib
Click on Configuration Properties->Linker->Input, and edit the Additional Dependencies. Add:
opencv_core231d.lib
opencv_imgproc231d.lib
opencv_highgui231d.lib
opencv_ml231d.lib
opencv_video231d.lib
opencv_features2d231d.lib
opencv_calib3d231d.lib
opencv_objdetect231d.lib
opencv_contrib231d.lib
opencv_legacy231d.lib
opencv_flann231d.lib
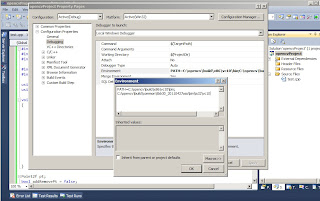
Click on Configuration Properties->Debugging, and edit the Environment.
PATH=C:\opencv\build\x86\vc10\bin;C:\opencv\build\common\tbb30_20110427oss\bin\ia32\vc10
Your all set.
(UPDATE)
i realized when trying to compile lkdemo.cpp an error:
even though opencv has a tbb folder in the build/common it does not include the complete library so we need to download the whole version from http://threadingbuildingblocks.org/ver.php?fid=171
and unzip it to "c:\opencv\build\common". there is no need to compile it as its already ready for use.
just make the additional changes to the library and include and bin files for this to work.
Download The "super pack" and unzip to "C:\OPENCV"
it seems you can only get the source of opencv and need to compile it with CMAKE.
very straight forward.
download CMAKE and use the command prompt to enter CMAKE CMAKELIST.txt at the opencv directory
Open "ALL_BUILD" by double clicking - opens up visual studio
Compile it and wait. (took a minute)
go to properties and select the release version and compile again (took another minute)
your all set with the opencv installation "c:\opencv\build"
create an empty visual studio "win32 console application"
Click on Configuration Properties->VC++ Directories, and edit the Include Directories. Add:
C:\opencv\build\common\tbb30_20110427oss\include (UPDATE)
C:\opencv\build\include
Click on Configuration Properties->VC++ Directories, and edit the Library Directories. Add:
C:\opencv\build\common\tbb30_20110427oss\lib\ia32\vc10 (UPDATE)
C:\opencv\build\x86\vc10\lib
Click on Configuration Properties->Linker->Input, and edit the Additional Dependencies. Add:
opencv_core231d.lib
opencv_imgproc231d.lib
opencv_highgui231d.lib
opencv_ml231d.lib
opencv_video231d.lib
opencv_features2d231d.lib
opencv_calib3d231d.lib
opencv_objdetect231d.lib
opencv_contrib231d.lib
opencv_legacy231d.lib
opencv_flann231d.lib
Click on Configuration Properties->Debugging, and edit the Environment.
PATH=C:\opencv\build\x86\vc10\bin;C:\opencv\build\common\tbb30_20110427oss\bin\ia32\vc10

Your all set.
(UPDATE)
i realized when trying to compile lkdemo.cpp an error:

even though opencv has a tbb folder in the build/common it does not include the complete library so we need to download the whole version from http://threadingbuildingblocks.org/ver.php?fid=171
and unzip it to "c:\opencv\build\common". there is no need to compile it as its already ready for use.
just make the additional changes to the library and include and bin files for this to work.
I followed your instructions to the letter, and truth to be told they were really helpful.
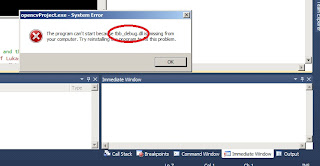
ReplyDeleteRecently I faced a linking problem which I couldn't fix. The error message is as follows,
"The program can't start because opencv_core231d.dll is missing from your computer. Try re-installing the program to fix this problem"
Do you've any idea?
Well.. I solved this problem by coping all the .dlls to the folder where the .exe exists.
ReplyDeleteNow, I've another problem regarding tbb_debu! I get the error message,
"The program can't start because tbb_debug.dll is missing from your computer. Try re-installing the program to fix this problem"
Sorry, but I solved it with the same method.
ReplyDeleteBut is there anyway to avoid the stated solution.
I was almost going to install all my OS just to solve it. It was driving me crazy!
Thanks anyway.