#include <opencv2/video/tracking.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <stdio.h>
#include <opencv2/objdetect/objdetect.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/imgproc/imgproc_c.h>
#include <opencv2/video/tracking.hpp>
#include <iostream>
#include <vector>
// define whether to use approximate nearest-neighbor search
#define USE_FLANN
IplImage *image = 0;
double compareSURFDescriptors( const float* d1, const float* d2, double best, int length )
{
double total_cost = 0;
assert( length % 4 == 0 );
for( int i = 0; i < length; i += 4 )
{
double t0 = d1[i] - d2[i];
double t1 = d1[i+1] - d2[i+1];
double t2 = d1[i+2] - d2[i+2];
double t3 = d1[i+3] - d2[i+3];
total_cost += t0*t0 + t1*t1 + t2*t2 + t3*t3;
if( total_cost > best )
break;
}
return total_cost;
}
int naiveNearestNeighbor( const float* vec, int laplacian,
const CvSeq* model_keypoints,
const CvSeq* model_descriptors )
{
int length = (int)(model_descriptors->elem_size/sizeof(float));
int i, neighbor = -1;
double d, dist1 = 1e6, dist2 = 1e6;
CvSeqReader reader, kreader;
cvStartReadSeq( model_keypoints, &kreader, 0 );
cvStartReadSeq( model_descriptors, &reader, 0 );
for( i = 0; i < model_descriptors->total; i++ )
{
const CvSURFPoint* kp = (const CvSURFPoint*)kreader.ptr;
const float* mvec = (const float*)reader.ptr;
CV_NEXT_SEQ_ELEM( kreader.seq->elem_size, kreader );
CV_NEXT_SEQ_ELEM( reader.seq->elem_size, reader );
if( laplacian != kp->laplacian )
continue;
d = compareSURFDescriptors( vec, mvec, dist2, length );
if( d < dist1 )
{
dist2 = dist1;
dist1 = d;
neighbor = i;
}
else if ( d < dist2 )
dist2 = d;
}
if ( dist1 < 0.6*dist2 )
return neighbor;
return -1;
}
void findPairs( const CvSeq* objectKeypoints, const CvSeq* objectDescriptors,
const CvSeq* imageKeypoints, const CvSeq* imageDescriptors, vector<int>& ptpairs )
{
int i;
CvSeqReader reader, kreader;
cvStartReadSeq( objectKeypoints, &kreader );
cvStartReadSeq( objectDescriptors, &reader );
ptpairs.clear();
for( i = 0; i < objectDescriptors->total; i++ )
{
const CvSURFPoint* kp = (const CvSURFPoint*)kreader.ptr;
const float* descriptor = (const float*)reader.ptr;
CV_NEXT_SEQ_ELEM( kreader.seq->elem_size, kreader );
CV_NEXT_SEQ_ELEM( reader.seq->elem_size, reader );
int nearest_neighbor = naiveNearestNeighbor( descriptor, kp->laplacian, imageKeypoints, imageDescriptors );
if( nearest_neighbor >= 0 )
{
ptpairs.push_back(i);
ptpairs.push_back(nearest_neighbor);
}
}
}
void flannFindPairs( const CvSeq*, const CvSeq* objectDescriptors,
const CvSeq*, const CvSeq* imageDescriptors, vector<int>& ptpairs )
{
int length = (int)(objectDescriptors->elem_size/sizeof(float));
cv::Mat m_object(objectDescriptors->total, length, CV_32F);
cv::Mat m_image(imageDescriptors->total, length, CV_32F);
// copy descriptors
CvSeqReader obj_reader;
float* obj_ptr = m_object.ptr<float>(0);
cvStartReadSeq( objectDescriptors, &obj_reader );
for(int i = 0; i < objectDescriptors->total; i++ )
{
const float* descriptor = (const float*)obj_reader.ptr;
CV_NEXT_SEQ_ELEM( obj_reader.seq->elem_size, obj_reader );
memcpy(obj_ptr, descriptor, length*sizeof(float));
obj_ptr += length;
}
CvSeqReader img_reader;
float* img_ptr = m_image.ptr<float>(0);
cvStartReadSeq( imageDescriptors, &img_reader );
for(int i = 0; i < imageDescriptors->total; i++ )
{
const float* descriptor = (const float*)img_reader.ptr;
CV_NEXT_SEQ_ELEM( img_reader.seq->elem_size, img_reader );
memcpy(img_ptr, descriptor, length*sizeof(float));
img_ptr += length;
}
// find nearest neighbors using FLANN
cv::Mat m_indices(objectDescriptors->total, 2, CV_32S);
cv::Mat m_dists(objectDescriptors->total, 2, CV_32F);
cv::flann::Index flann_index(m_image, cv::flann::KDTreeIndexParams(4)); // using 4 randomized kdtrees
flann_index.knnSearch(m_object, m_indices, m_dists, 2, cv::flann::SearchParams(64) ); // maximum number of leafs checked
int* indices_ptr = m_indices.ptr<int>(0);
float* dists_ptr = m_dists.ptr<float>(0);
for (int i=0;i<m_indices.rows;++i) {
if (dists_ptr[2*i]<0.6*dists_ptr[2*i+1]) {
ptpairs.push_back(i);
ptpairs.push_back(indices_ptr[2*i]);
}
}
}
/* a rough implementation for object location */
int locatePlanarObject( const CvSeq* objectKeypoints, const CvSeq* objectDescriptors,
const CvSeq* imageKeypoints, const CvSeq* imageDescriptors,
const CvPoint src_corners[4], CvPoint dst_corners[4] )
{
double h[9];
CvMat _h = cvMat(3, 3, CV_64F, h);
vector<int> ptpairs;
vector<CvPoint2D32f> pt1, pt2;
CvMat _pt1, _pt2;
int i, n;
#ifdef USE_FLANN
flannFindPairs( objectKeypoints, objectDescriptors, imageKeypoints, imageDescriptors, ptpairs );
#else
findPairs( objectKeypoints, objectDescriptors, imageKeypoints, imageDescriptors, ptpairs );
#endif
n = (int)(ptpairs.size()/2);
if( n < 4 )
return 0;
pt1.resize(n);
pt2.resize(n);
for( i = 0; i < n; i++ )
{
pt1[i] = ((CvSURFPoint*)cvGetSeqElem(objectKeypoints,ptpairs[i*2]))->pt;
pt2[i] = ((CvSURFPoint*)cvGetSeqElem(imageKeypoints,ptpairs[i*2+1]))->pt;
}
_pt1 = cvMat(1, n, CV_32FC2, &pt1[0] );
_pt2 = cvMat(1, n, CV_32FC2, &pt2[0] );
if( !cvFindHomography( &_pt1, &_pt2, &_h, CV_RANSAC, 5 ))
return 0;
for( i = 0; i < 4; i++ )
{
double x = src_corners[i].x, y = src_corners[i].y;
double Z = 1./(h[6]*x + h[7]*y + h[8]);
double X = (h[0]*x + h[1]*y + h[2])*Z;
double Y = (h[3]*x + h[4]*y + h[5])*Z;
dst_corners[i] = cvPoint(cvRound(X), cvRound(Y));
}
return 1;
}
int main(int argc, char** argv)
{
CvCapture* capture = cvCreateCameraCapture(0);
CvMat* image = 0, *object = 0;
CvSeq *imageKeypoints = 0, *imageDescriptors = 0,*objectKeypoints = 0, *objectDescriptors = 0;
CvMemStorage* storage = cvCreateMemStorage(0);
int i;
static CvScalar colors[] =
{
{{0,0,255}},
{{0,128,255}},
{{0,255,255}},
{{0,255,0}},
{{255,128,0}},
{{255,255,0}},
{{255,0,0}},
{{255,0,255}},
{{255,255,255}}
};
if( !capture )
return -1;
for(;;)
{
int firstFrame = object == 0;
int percent = 50;
IplImage* source = cvQueryFrame(capture);
// declare a destination IplImage object with correct size, depth and channels
IplImage *frame = cvCreateImage
( cvSize((int)((source->width*percent)/100) , (int)((source->height*percent)/100) ),
source->depth, source->nChannels );
//use cvResize to resize source to a destination image
cvResize(source, frame);
if(!frame)
break;
if(!object)
{
object = cvCreateMat(frame->height, frame->width, CV_8UC1);
image = cvCreateMat(object->rows, object->cols, object->type);
}
cvCvtColor(frame, object, CV_BGR2GRAY);
if( !firstFrame )
{
//Extract SURF points by initializing parameters
CvSURFParams params = cvSURFParams(500, 1);
cvExtractSURF( image, 0, &imageKeypoints, &imageDescriptors, storage, params );
cvExtractSURF( object, 0, &objectKeypoints, &objectDescriptors, storage, params );
CvPoint src_corners[4] = {{0,0}, {object->width,0}, {object->width, object->height}, {0, object->height}};
CvPoint dst_corners[4];
IplImage* correspond = cvCreateImage( cvSize(image->width, object->height+image->height), 8, 1 );
cvSetImageROI( correspond, cvRect( 0, 0, object->width, object->height ) );
cvCopy( object, correspond );
cvSetImageROI( correspond, cvRect( 0, object->height, correspond->width, correspond->height ) );
cvCopy( image, correspond );
cvResetImageROI( correspond );
#ifdef USE_FLANN
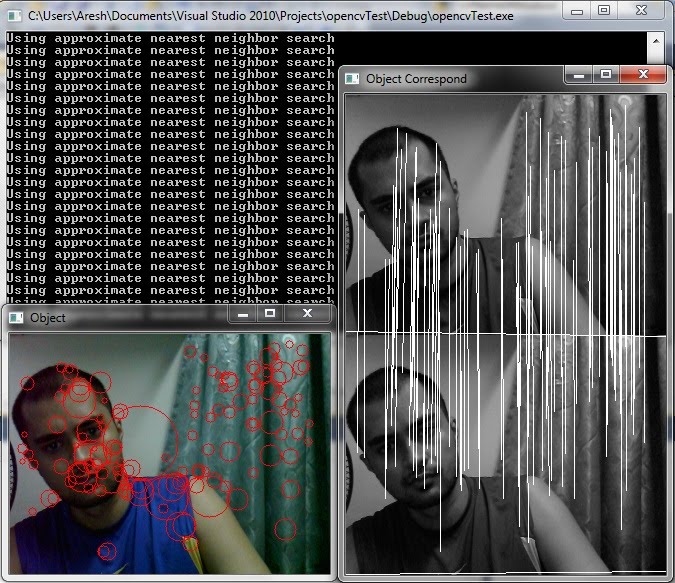
printf("Using approximate nearest neighbor search\n");
#endif
if( locatePlanarObject( objectKeypoints, objectDescriptors, imageKeypoints,
imageDescriptors, src_corners, dst_corners ))
{
for( i = 0; i < 4; i++ )
{
CvPoint r1 = dst_corners[i%4];
CvPoint r2 = dst_corners[(i+1)%4];
cvLine( correspond, cvPoint(r1.x, r1.y+object->height ),
cvPoint(r2.x, r2.y+object->height ), colors[8] );
}
}
vector<int> ptpairs;
#ifdef USE_FLANN
flannFindPairs( objectKeypoints, objectDescriptors, imageKeypoints, imageDescriptors, ptpairs );
#else
findPairs( objectKeypoints, objectDescriptors, imageKeypoints, imageDescriptors, ptpairs );
#endif
for( i = 0; i < (int)ptpairs.size(); i += 2 )
{
CvSURFPoint* r1 = (CvSURFPoint*)cvGetSeqElem( objectKeypoints, ptpairs[i] );
CvSURFPoint* r2 = (CvSURFPoint*)cvGetSeqElem( imageKeypoints, ptpairs[i+1] );
cvLine( correspond, cvPointFrom32f(r1->pt),
cvPoint(cvRound(r2->pt.x), cvRound(r2->pt.y+object->height)), colors[8] );
}
cvShowImage( "Object Correspond", correspond );
for( i = 0; i < objectKeypoints->total; i++ )
{
CvSURFPoint* r = (CvSURFPoint*)cvGetSeqElem( objectKeypoints, i );
CvPoint center;
int radius;
center.x = cvRound(r->pt.x);
center.y = cvRound(r->pt.y);
radius = cvRound(r->size*1.2/9.*2);
cvCircle( frame, center, radius, colors[0], 1, 8, 0 );
}
cvShowImage( "Object", frame );
}
if(cvWaitKey(30)>=0)
break;
{
CvMat* temp;
CV_SWAP(image, object, temp);
}
}
cvReleaseCapture(&capture);
return 0;
}
Comments
Post a Comment